А для неё нужно дрожжевое тесто. Которое нужно замешивать, расстаивать, и т.д. Вставать ради этого в 7 утра — никакого желания. Поэтому я решил испробовать метод приготовления дрожжевого теста в холодильнике. И попутно испробовать замес с помощью ручного миксера с «крючками» (специальными насадками для замеса теста).
Замесил тесто из 250 г муки в чашке (см. рис. 1). Закрыл пакетом, чтобы не было контакта с воздухом, и поставил в холодильник.
Наутро тесто отлично поднялось. Осталось только раскатать, разложить начинку и выпечь.
Такой подход признаю очень практичным. Буду применять в будущем.
Уже не помню, который он будет по счёту, поэтому перехожу на нумерацию по годам. 🙂
Мне очень нравятся эти материалы. Основная ткань — «Кордон-500», подкладка — «Oxford 300D PU1000 соты». Кордон уже показал себя как ткань практически не выцветающая на солнце. Рюкзаки 2-3-летней давности после стирки выглядят как только что сшитые. К тому же эта ткань даёт характерный отблеск на солнце и чуть меняет цвет, если смотреть под разным углом. Что заметно улучшает внешний вид. Особенно в сочетании со световозвращаюшим кантом.
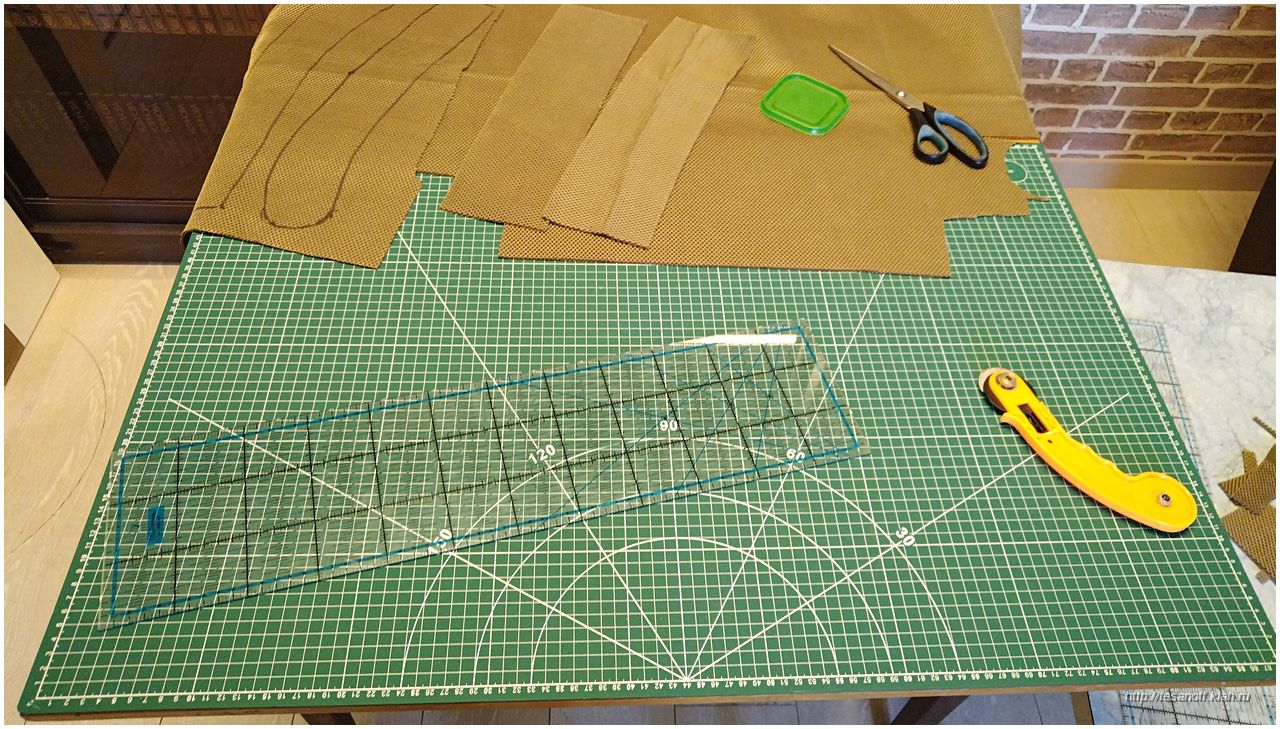
Имею сказать, что большой коврик для раскроя — это не роскошь, а средство существенного ускорения работы и повышения качества резов.
До недавнего времени я пользовался ковриком в 2 раза меньшего размера (60*45). И при вырезании деталей, размер которых был больше, чем размер коврика, приходилось его перекладывать, выравнивать линию реза, и всё такое.
А на этом коврике (60*90) я просто кладу две линейки встык и режу дисковым ножом за один приём. Получается очень существенно быстрее. И ровнее. (На рис.1 показана одна из двух моих линеек.)
Продолжаю учить следующую композицию. На приведённом ниже видосе — вступление. В первом приближении — выучил. Дальше — полировка. Я не профи, мне нужно много времени, чтобы что-то разучить. (Учась в муз. школе, я учил быстрее, но это было 41 год назад. 🙂 )
Теперь, когда у меня в руках MIDI-баян V3, клавиатура которого чувствительна к скорости нажатия клавиш, я могу себе позволить взяться за фортепианные произведения. Вроде бы естественно звучит. В предыдущей версии системы, рояль звучал так, как будто это была музыкальная шкатулка — все звуки имели строго одинаковую силу; никакой выразительности. А здесь хотя бы есть ощущение, что играет не музыкальная шкатулка, а живой человек.
Это не реклама, мне никто за эту заметку не платил. Я по собственной инициативе делюсь собственным опытом.
Вот уже несколько месяцев я могу сравнивать звуки из «широко известного в узких кругах MIDI-баянистов» модуля Ketron SD2 и моего ATemp (MB Music) Pro.DX.
На текущий момент я считаю модуль от ATemp более подходящим для меня. И рекомендую к приобретению MB Music Pro.XS. Он по звукам точно такой же, как мой, только пользоваться им несколько удобнее.
Причины моего выбора:
Имеется очень правдоподобный чистый звук классического баяна (без разлива). Причём этот звук отлично звучит и в правой, и в аккордах, и в басу.
Звук бандонеона, хоть и монофонический, но тоже отлично звучит и в правой, и в аккордах, и в басу. То есть здесь мы имеем целых два «баянных» баса на выбор. (В Кетроне нет ни одного хорошо звучащего баянного баса).
Медные духовые звучат натуральнее, чем в Кетроне.
Большой выбор басовых звуков (бас-гитары, несколько контрабасов).
Сбалансированное звучание всех звуков классического рояля, по всему диапазону (у кетрона нижние звуки слишком мощные).
Саксофоны звучат натуральнее, чем в Кетроне.
Органные звуки и разнообразнее, и интереснее. В Кетроне я не смог подобрать подходящий звук для «Проезда цистерны» Г.Гладкова.
У Кетрона на сегодня я вижу пока только один плюс:
Наличие аккордеонного звука, очень похожего на тот, которым часто пользуется Ludovic Beier
Пожалуй, аккордеонные звуки Кетрона поинтереснее ATEMP-овских, но это неточно. (Однако отсутствие приемлемо звучащего «баянного» баса всё портит.)
До того, как я перенёс блог на собственный сайт (т.е. вот этот, где вы эту заметку сейчас читаете), я рассматривал Дзен как платформу для перехода туда. И даже на всякий случай создал там свой канал.
Всё это время я за этим самым дзеном наблюдал, чтобы понять, есть там хоть какая-то тенденция к превращению платформы в нечто приемлемое.
Вынужден признать, что нет. Судя по тому, что продолжало попадаться там мне на глаза, 95% тамошних авторов пишут лютую пургу. Причём с единственной целью: чтобы набрать как можно больше комментариев в стиле «КГ/АМ». Потому что платформе всё равно, что там в комментариях написано. Надо чтобы их было чем больше тем лучше.
В общем, эксперимент признаю неудачным, в эту помойку я больше ни ногой. За всё это время я не смог там найти вообще ничего полезного.
Но прежде чем разучивать, скрещиваю баянный вариант и фортепианный. В баянном варианте, который у меня тоже есть, во вступлении левая рука слишком примитивная. В фортепианном варианте в левой гораздо веселее. (Правая — наоборот: интереснее баянный вариант.)
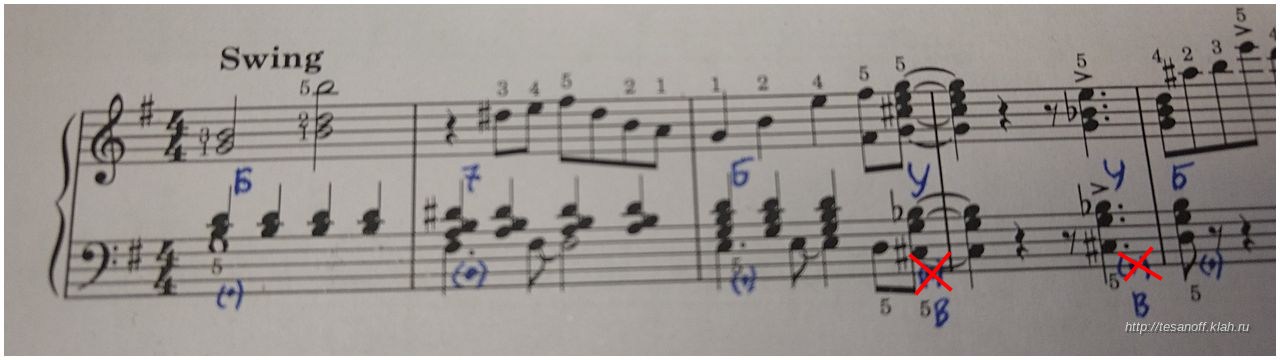
И при ближайшем рассмотрении оказалось, что фортепианная левая рука вполне нормально играется на готовых аккордах (см. рис. 1). Хорошо, что я уже знаком с концепцией игры джазовых аккордов на левой баянной клавиатуре.
Единственное место, где я затупил — это в попытке играть уменьшенный аккорд от баса «соль». Правая рука меня ввела в заблуждение. А потом я вспомнил, что в левой можно сделать N-гармоническую замену и играть уменьшенный септаккорд от «до-диез» (почему меня на эту мысль сразу не навёл соответствующий бас в нотах — загадка). Зачёркнутый на рис. 1 бас как-бы символизирует моё тугодумие.
Но с этой поправкой — всё довольно удобно играется. Причём, можно сказать, без длинных «прыжков» в левой, которые я очень не люблю.
(Я в курсе, что можно вступление играть на выборке, но это не спортивно. К тому же на готовых аккордах всё это звучит сочнее, т.к. бас более низкий, а на выборке был бы жиденький.)
Как и ожидалось, трудно соединяются ритмы: свинговый в правой и ровный в левой. Но это решается большим количеством повторений в медленном темпе под метроном.
Попался мне видос (см. скриншот на рис. 1). Я заинтересовался.
В Ашане взял густейший йогурт (по-моему «Киржачский», в таких пластмассовых банках с крышкой — он уже густой, с ним для этого ничего дополнительно не надо делать) и икру сельди самую дешевую (в моём случае «Каждый день» — собственная ашановская марка). Просто смешал банку икры и 250 г йогурта. Украшательствами я не занимался, пробовал так.
Вкусно! Необычно, но весьма вкусно. Обязательно буду регулярно такое есть. Мне очень понравилось.
Я думал, что я знаю, что такое специя «уцхо-сунели» (она же «чаман», она же «пажитник»). И я уже успел решить, что она мне не очень нравится, и что я не планирую её активно использовать.
Оказывается, это потому, что я не пробовал специю, пакетик от которой у меня сейчас на рис.1.
Очень приятный, очень специфичный запах и вкус. Разница между тем, что я покупал вразвес на нашем рынке, и тем, что было в этом пакетике — очень большая. Оказывается, на рынке мне вместо уцхо-сунели продавали какую-то пыль из-под дивана.
Тем, кто практикует приготовление блюд из Кавказских кухонь, — очень рекомендую.