Продолжаю учить следующую композицию. На приведённом ниже видосе — вступление. В первом приближении — выучил. Дальше — полировка. Я не профи, мне нужно много времени, чтобы что-то разучить. (Учась в муз. школе, я учил быстрее, но это было 41 год назад. 🙂 )
Теперь, когда у меня в руках MIDI-баян V3, клавиатура которого чувствительна к скорости нажатия клавиш, я могу себе позволить взяться за фортепианные произведения. Вроде бы естественно звучит. В предыдущей версии системы, рояль звучал так, как будто это была музыкальная шкатулка — все звуки имели строго одинаковую силу; никакой выразительности. А здесь хотя бы есть ощущение, что играет не музыкальная шкатулка, а живой человек.
Это не реклама, мне никто за эту заметку не платил. Я по собственной инициативе делюсь собственным опытом.
Вот уже несколько месяцев я могу сравнивать звуки из «широко известного в узких кругах MIDI-баянистов» модуля Ketron SD2 и моего ATemp (MB Music) Pro.DX.
На текущий момент я считаю модуль от ATemp более подходящим для меня. И рекомендую к приобретению MB Music Pro.XS. Он по звукам точно такой же, как мой, только пользоваться им несколько удобнее.
Причины моего выбора:
Имеется очень правдоподобный чистый звук классического баяна (без разлива). Причём этот звук отлично звучит и в правой, и в аккордах, и в басу.
Звук бандонеона, хоть и монофонический, но тоже отлично звучит и в правой, и в аккордах, и в басу. То есть здесь мы имеем целых два «баянных» баса на выбор. (В Кетроне нет ни одного хорошо звучащего баянного баса).
Медные духовые звучат натуральнее, чем в Кетроне.
Большой выбор басовых звуков (бас-гитары, несколько контрабасов).
Сбалансированное звучание всех звуков классического рояля, по всему диапазону (у кетрона нижние звуки слишком мощные).
Саксофоны звучат натуральнее, чем в Кетроне.
Органные звуки и разнообразнее, и интереснее. В Кетроне я не смог подобрать подходящий звук для «Проезда цистерны» Г.Гладкова.
У Кетрона на сегодня я вижу пока только один плюс:
Наличие аккордеонного звука, очень похожего на тот, которым часто пользуется Ludovic Beier
Пожалуй, аккордеонные звуки Кетрона поинтереснее ATEMP-овских, но это неточно. (Однако отсутствие приемлемо звучащего «баянного» баса всё портит.)
Но прежде чем разучивать, скрещиваю баянный вариант и фортепианный. В баянном варианте, который у меня тоже есть, во вступлении левая рука слишком примитивная. В фортепианном варианте в левой гораздо веселее. (Правая — наоборот: интереснее баянный вариант.)
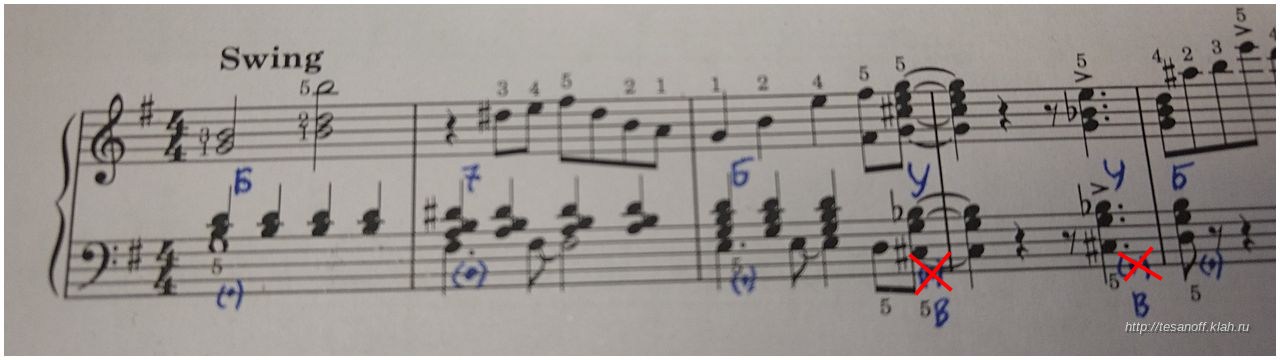
И при ближайшем рассмотрении оказалось, что фортепианная левая рука вполне нормально играется на готовых аккордах (см. рис. 1). Хорошо, что я уже знаком с концепцией игры джазовых аккордов на левой баянной клавиатуре.
Единственное место, где я затупил — это в попытке играть уменьшенный аккорд от баса «соль». Правая рука меня ввела в заблуждение. А потом я вспомнил, что в левой можно сделать N-гармоническую замену и играть уменьшенный септаккорд от «до-диез» (почему меня на эту мысль сразу не навёл соответствующий бас в нотах — загадка). Зачёркнутый на рис. 1 бас как-бы символизирует моё тугодумие.
Но с этой поправкой — всё довольно удобно играется. Причём, можно сказать, без длинных «прыжков» в левой, которые я очень не люблю.
(Я в курсе, что можно вступление играть на выборке, но это не спортивно. К тому же на готовых аккордах всё это звучит сочнее, т.к. бас более низкий, а на выборке был бы жиденький.)
Как и ожидалось, трудно соединяются ритмы: свинговый в правой и ровный в левой. Но это решается большим количеством повторений в медленном темпе под метроном.
Я тут записал свою версию известной песни Фёдора Чистякова.
Ноты взяты из разных источников. Левая рука — в основном из видео Алексея Лиса. Правая рука — в основном из обработки Евгения Архипова (в нескольких местах переделал по-своему чтобы не противоречило левой руке). Гитарное соло — как-то содрал из оригинального клипа. Гитару со слайдом имитировал эффектом «portamento»; конечно, получилось не в точности как надо, но, по-моему, лучше чем ничего.
Это первый мой видос с MIDI-баяном v3. Особенность конкретно этой композиции в том, что громкость правой руки управляется мехом (как и полагается в баяне), а громкость левой руки фиксирована и от меха не зависит.
Исполнение не на 100% чистое, но оставил как есть. «И так сойдёт», мне не на конкурс, а для демонстрации возможностей инструмента.
Связь ремёсел прослеживается по меткам в данной записи. 🙂
Для того, чтобы на [MIDI-баяне] играть через колонку (см. рис. 1), нужно сначала её сделать (столярка).
Для того, чтобы её закончить, нужно сделать лицевую декоративную сетку. В качестве сетки будет использована т.н. «силовая сетка«, которая используется для шитья.
А поскольку в планах изготовление нескольких швейных предметов, то, пожалуй, самое время провести ревизию всяких расходников (окантовочная лента, стропы, молнии, прочая сумочная фурнитура) и заказать недостающее.
Но если надо играть для кого-то, то единственный имеющийся у меня вариант — это маленькая BT-колонка. Для своих целей она звучит вполне приемлемо, но играть через неё плохо: внутренний объем колонки очень маленький, и низкие частоты там конкретно провалены. Бас звучит некрасиво.
Я решил сделать свою активную колонку в формате Soundbar. Чтобы было «два в одном» — и к телевизору можно подключить, и на баяне через неё можно поиграть.
Поскольку высота такой колонки должна быть маленькой, большие динамики в неё не воткнёшь. Поэтому я взял широкополосные 50-миллиметровые вот такие.
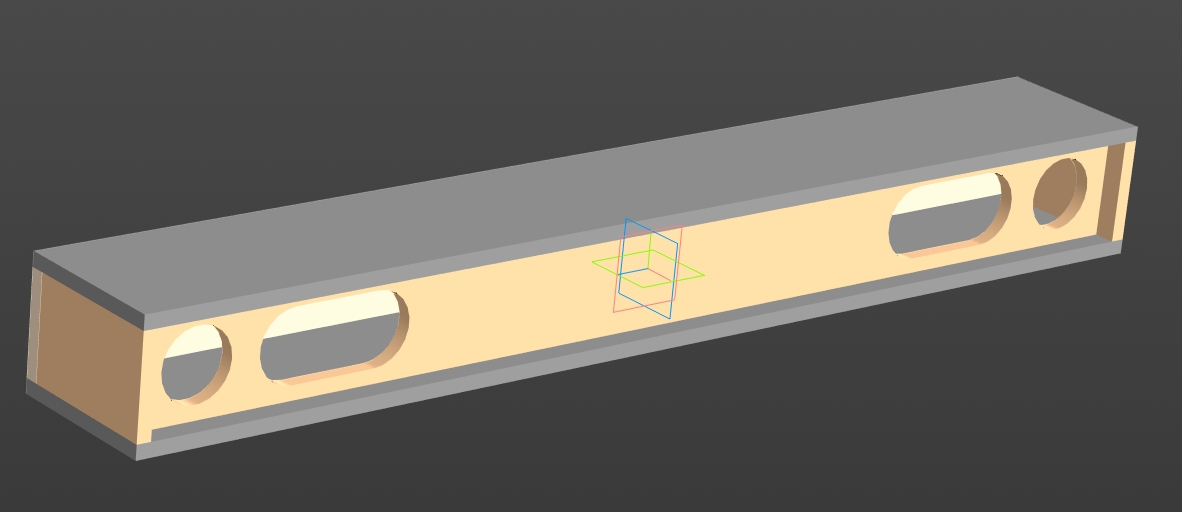
Акустическую схему я взял «закрытый ящик с пассивным излучателем». По нынешним временам это дёшево и сердито. Для выбранного динамика оптимальный внутренний объем — это примерно 1.2 л.
Перед тем, как делать «начисто», я решил сначала сделать прототип, на котором послушаю, как оно в целом звучит. (См. рис. 1)
«Прозрачных высоких» этот прототип, конечно, не выдаёт. Но в целом звучит гораздо лучше мелкой покупной колонки. Низкие частоты звучат отлично. Через такую колонку вполне можно играть, я уже попробовал. Все композиции звучат довольно хорошо.
Были проблемы с противным резонансом на частоте «Ля 2-й октавы». Решилось заменой пары маленьких и лёгких пассивных излучателей на один большой, а также, установкой наклонной рассекающей перегородки внутри.
Теперь можно браться за «чистовое» изделие.
Рис. 1
P.S. Само чистовое изделие будет устроено как-то так:
Я добавлял чувствительность к скорости нажатия в свой MIDI-баян в том числе для того, чтобы естественно звучали вот такие штуки (по ссылке — короткий урок на тему «How to Play Beginner Cocktail Piano in 3 Steps»).
Однако, одной только чувствительности не хватило.
Для того, чтобы играть «сложные» аккорды левой рукой на баяне, нужно набирать нужные звуки, нажимая несколько кнопок «стандартных» аккордов. Вот здесь я выкладывал XLS-файл с калькулятором, помогающим определить, какие аккорды нужно нажимать, чтобы получился требуемый «сложный» аккорд.
Так вот, для того, чтобы играть аккорд Cmaj7 одновременно с басом (C), на левой руке не хватает пальцев. 🙂 Пианисты в таких случаях используют педаль. А значит и мне надо.
В результате я реализовал режим «педаль» в котором бас и аккорд продолжают звучать после отпускания кнопок до тех пор, пока не будет нажат новый бас, или пока не будет выключен режим «педаль».
В результате стало возможно получить вот такое звучание:
Теперь нужно привыкать нажимать кнопки с нужной силой. У баянистов такой привычки нет; в результате некоторые нажатия у меня пока получаются слишком слабые, а некоторые другие — слишком сильные.
Я тут решил попробовать добавить второй голос к «Ленивому Дику». Без второго голоса, всё-таки, чего-то не хватает.
За основу взял второй вариант записи. И просто наложил запись второго голоса.
В одном месте (на 1:13), конечно, первый и второй голоса плохо сочетаются, звучат фальшиво. Но я не понимаю, что я с этим могу поделать; пока оставлю так.
Как и обещал, публикую короткую техническую демонстрацию режима «соло». А данном случае солирующим является самый низкий голос (скрипка). Всё, что выше звучащего солирующего звука более чем на 1 тон, звучит как орган.
Перемещаюсь по клавиатуре вверх/вниз, чтобы было понятнее, в чём суть режима.