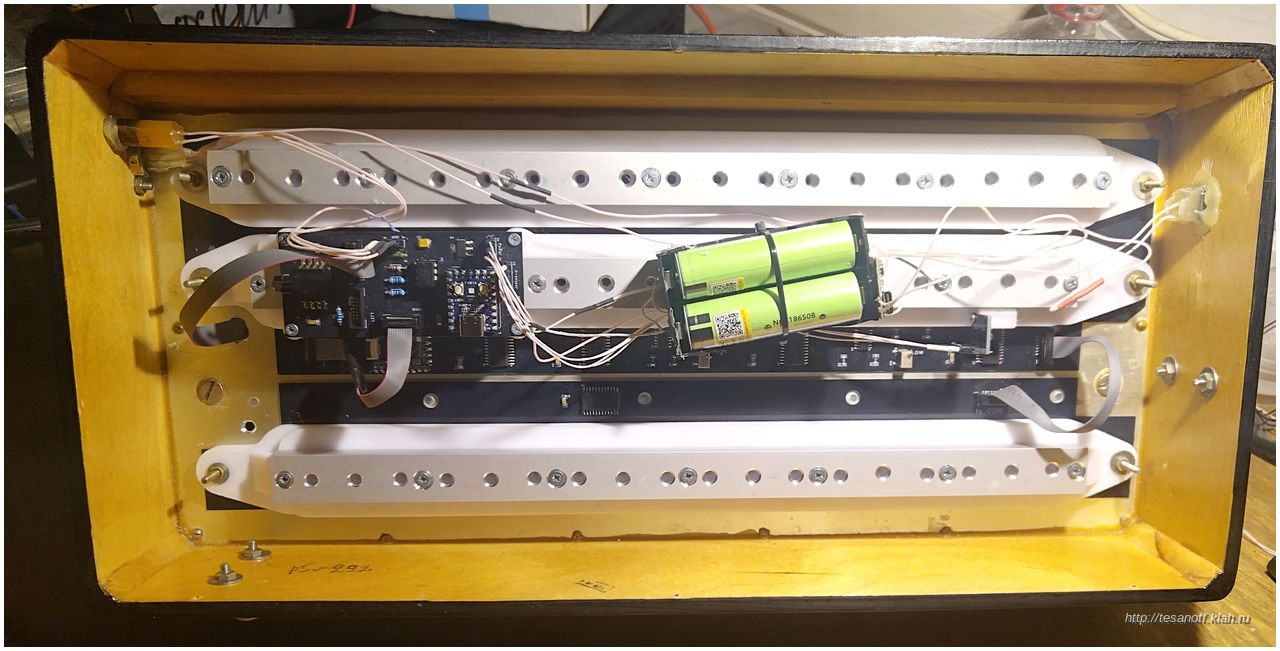
Всё, что планировал сделать, сделал. Электронную часть наладил; «странных необъяснимых глюков» не вижу уже 3 дня.
С точки зрения функционала, фантазия моя на данный момент иссякла. Сейчас есть всё, что нужно, для игры. Отличия от v2:
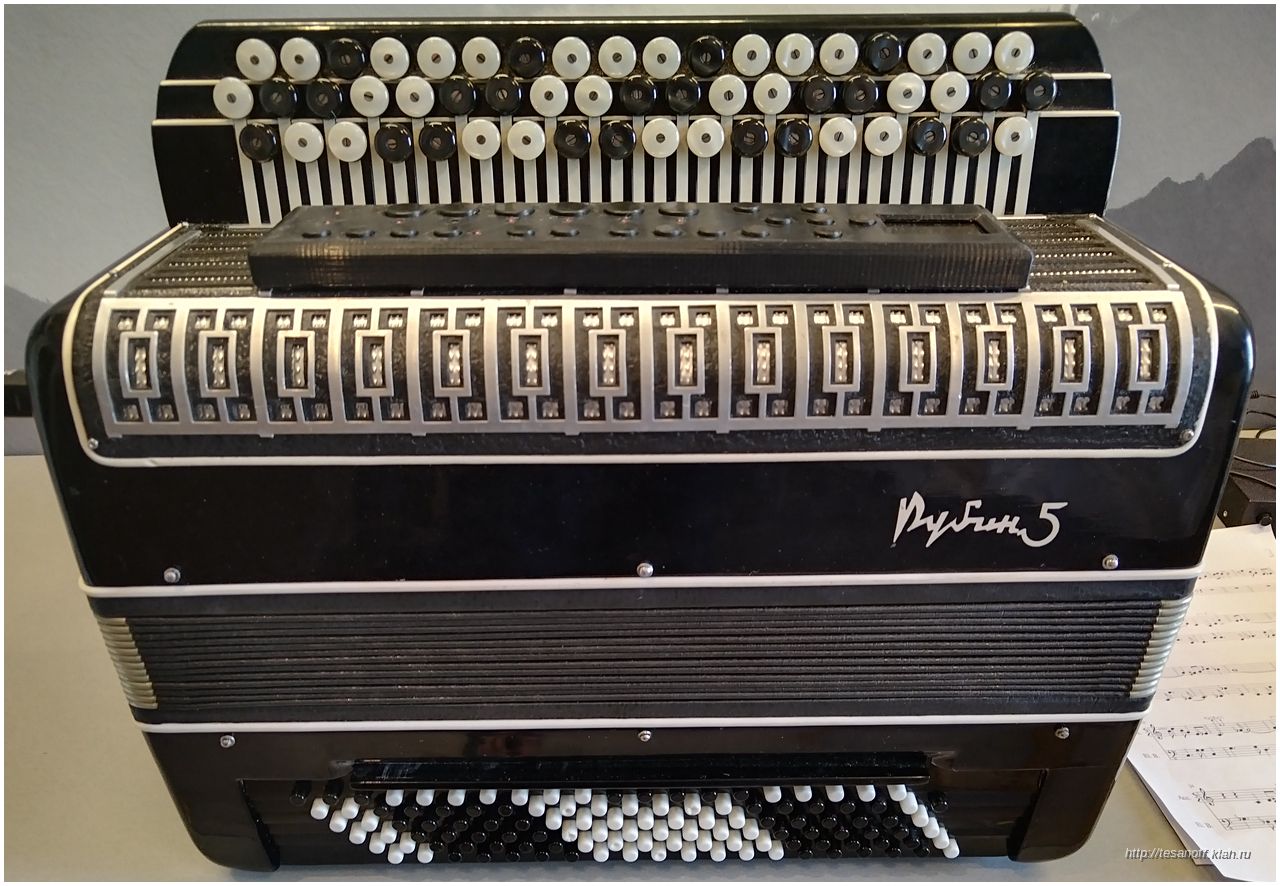
- Основное — это чувствительность клавиатур к скорости нажатия клавиш. Само собой, «рояльной» точности управления звуком добиться не получилось, но три уровня звучания (тихо, средне. громко) получаются без проблем.
- Добавлена функция «Акцент» для левой клавиатуры. Раньше можно было при нажатии баса или аккорда проигрывать звук ударного инструмента (любого выбранного). А сейчас, поскольку система может различить «обычное» и «сильное» нажатия, то на «сильные» нажатия баса и аккорда можно вешать дополнительные звуки. Например, при обычном нажатии будет звучать барабан, а при сильном ударе по клавише будет ещё звучать, например, тарелка.
- Добавлена функция «соло» для правой клавиатуры. В двух вариантах «соло верхней нотой» и «соло нижней нотой». Этот режим позволяет совмещать звуки двух музыкальных инструментов. Например, если нажать «До» 1-й октавы, то одиночная нота будет звучать звуком текущего пресета. А если, удерживая «До», нажать ещё «Ми» и «Соль» 1-й октавы, то эти две ноты будут звучать уже тем звуком, который настроен в 6-м пресете текущего набора пресетов. (Техническую демонстрашку для этой функции я скоро запишу на видео, а вот сыграть что-нибудь, используя эту функцию, я пока не смогу, ибо недостаточно продвинут для того, чтобы играть подобное сходу, «из головы».)
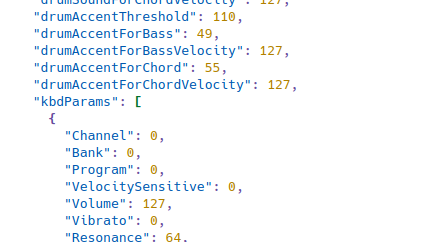
- Все пресеты, хранящиеся в энергонезависимой памяти EEPROM, теперь можно сохранить в виде резервной копии на SD-карту, в файл формата JSON. Это даёт возможность восстановить настроенные пресеты после «сброса на заводские настройки». Лично мне этой возможности очень сильно не хватало, т.к. при изменении внутреннего формата пресета приходилось то и дело переинициализировать всю EEPROM значениями по-умолчанию.
- Добавлена возможность настраивать чувствительность датчика давления — т.е. задавать уровень давления, при котором система будет звучать «на полную громкость». И можно даже задавать некоторую нелинейность зависимости громкости от давления.
В прошивке центрального модуля сейчас 16000 строк (на C++), а в прошивке клавиатур — 2600 строк (на C++).
Публикацию проекта v3 в открытый доступ я не планирую, ибо практического смысла в этом не вижу.