Я тут недавно наткнулся на 10-минутный мастер-класс от Людовика Бейера.
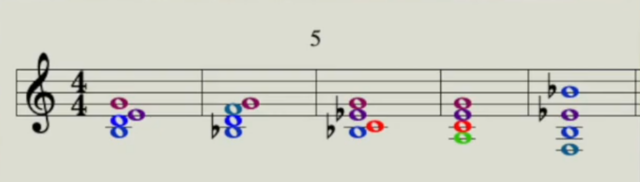
Он там показывает интересную аккордовую последовательность (см. рис. 1). Звучит это очень интересно, я даже попробовал сам поиграть:
Конечно, играю я косячно, темп гуляет. Но общее представление получить можно. Потихоньку, мелкими шагами я приближаюсь к пониманию того, «как он это всё делает».
Если бы я сейчас сам себя учил в музыкальной школе, то я учил бы себя не совсем так, как в прошлый раз, и не совсем тому, чему учили в прошлый раз. Но что сделано, то сделано, и доучиваться приходится самому. 🙂